 EMG Control Scheme
EMG Control Scheme
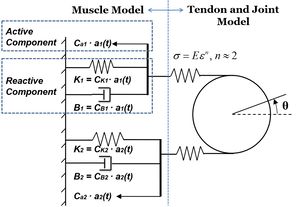
With powered joints, an energetically-active lower-limb prosthesis has a potential of generating the desired motion according to the user’s intention. To realize such potential, we are exploring a new fault-tolerant EMG direct control system for powered lower-limb prostheses. Electromyography (EMG) provides a non-intrusive interface to the user’s nervous system. The surface EMG electrode signals indicate the underlying muscle activation, which in turn reflects the amputee user’s intention for joint movement. To provide a natural control experience, we developed a biomimetic “active-reactive” actuation model, with the objective of capturing the essence of human motor control without excessive details involved. Two sensor signals are used as the model input, including a flexor signal and an extensor signal. Within the model, an active component represents the user’s active effort of moving a joint (which is a function of the difference between the signals), while a reactive component represents the joint’s response to the motion as dictated by the joint impedance (which in turn is a function of the sum of the flexor and extensor signals). As such, this unique actuation model enables a prosthesis user to modulate the actuation torque and joint impedance independently, in a way similar to the control of biological joints.
